| Intitulé de la thèse : Analyse de l’état du conducteur et de sa perception pour une conduite partagée avec un système autonome Laboratoire d’accueil : unité de recherche : Heudiasyc UMR 7253 (UTC) équipe de recherche : SyRI (Systèmes Robotiques en Interaction) site web : https://www.hds.utc.fr/recherche/equipes-de-recherche/syri-systemes-robotiques-en-interaction/ Directeur(s) de thèse : Insaf Setitra (MCF co-directrice) – équipe SyRI, Laboratoire Heudiasyc UMR-CNRS 7253, UTC Philippe Bonnifait (Professeur co-directeur) – équipe SyRI, Laboratoire Heudiasyc UMR-CNRS 7253, UTC Veronique Cherfaoui (Professeur co-encadrante) – équipe SyRI, Laboratoire Heudiasyc UMR-CNRS 7253, UTC Domaines de compétence : Informatique, électronique Mathématiques Description du sujet de thèse : Assurer une transition sûre et/ou une conduite partagée efficace entre le système de conduite autonome et le conducteur humain est un défi crucial dans l’automatisation de la conduite des véhicules. Elles nécessitent une évaluation de l’engagement du conducteur dans la tâche de conduite. L’analyse du regard apparaît comme un indicateur clé de l’attention du conducteur et de son état d’engagement (Deo & Trivedi, 2020 ; Kim et al., 2022). Cette thèse vise à proposer un système de surveillance du conducteur basé sur la vision monocaméra, qui aligne la perception humaine sur la représentation cyberphysique du véhicule (World Model WM). Il se concentre sur (1) la détection du regard à l’aide de monocaméras (Kim et al., 2022), (2) l’intégration de la saillance dans le WM pour mettre en évidence les zones critiques et l’Objet le Plus Important (Most Important Object MOI) (Jha et al., 2023 ; Yoo et al., 2021), et (3) la gestion de l’incertitude dans l’analyse du regard et les transitions de contrôle. En estimant l’engagement du conducteur, le système prendra en charge les transitions binaires et le contrôle partagé coopératif. L’approche implique le suivi du regard en temps réel, l’estimation de l’état d’engagement du conducteur et la validation expérimentale incluant plusieurs étapes de calibration sur un véhicule autonome, améliorant ainsi la collaboration homme-machine (human machine teaming) pour une conduite plus sûre. Bibliographie Deo, N. and Trivedi, M. M. (2020). Looking at the driver/rider in autonomous vehicles to predict takeover readiness. IEEE Transactions on Intelligent Vehicles, 5(1):41–52. S. Jha and C. Busso, « Estimation of Driver’s Gaze Region From Head Position and Orientation Using Probabilistic Confidence Regions, » in IEEE Transactions on Intelligent Vehicles, vol. 8, no. 1, pp. 59-72, Jan. 2023, doi: 10.1109/TIV.2022.3141071. Kim, J., Kim, W., Kim, H.-S., Lee, S.-J., Kwon, O.-C., and Yoon, D. (2022). A novel study on subjective driver readiness in terms of non-driving related tasks and take-over performance. ICT Express, 8(1):91–96. Yoo S, Jeong S, Kim S, Jang Y. Saliency-Based Gaze Visualization for Eye Movement Analysis. Sensors. 2021; 21(15):5178. https://doi.org/10.3390/s21155178 Mots clés Système de surveillance du conducteur, Estimation du regard, Détection de saillance, World Model, Conduite partagée, Préparation à la prise de contrôle. Profil et compétences du candidat Le/La candidat(e) idéal(e) doit être titulaire d’un master (ou équivalent) en informatique, intelligence artificielle, robotique ou dans un domaine connexe, et posséder de solides compétences en vision par ordinateur (2D, 3D), en apprentissage profond et en modélisation géométrique. La maîtrise des frameworks d’apprentissage automatique (PyTorch, TensorFlow, par exemple), de la programmation Python et une expérience en détection d’objets seraient appréciées. Une maîtrise des techniques d’estimation d’incertitude (modèles probabilistes) serait appréciée également. De solides compétences analytiques, une expérience avec des ensembles de données à grande échelle et la capacité à travailler au sein d’équipes interdisciplinaires sont un plus. Date de début de la thèse : Octobre 2025 Lieu de travail de thèse : Université de technologie de Compiègne Laboratoire Heudiasyc UMR-CNRS 7253 Cadidature : Pour candidater, merci d’envoyer un CV, une lettre de motivation, des copies des relevés de notes et diplômes (de préférence accompagnés des classements), ainsi qu’éventuellement une lettre de recommandation ou contact référant. Email : Insaf Setitra, Philippe Bonnifait, Véronique Cherfaoui prenom (point) nom (at) hds (point) utc (point) fr Seules les candidatures complètes seront examinées. Tous les documents doivent être rédigés en français ou en anglais. |
Annonce
[PhD] Analyse de l’état du conducteur et de sa perception pour une conduite partagée avec un système autonome
30 Novembre -0001
-


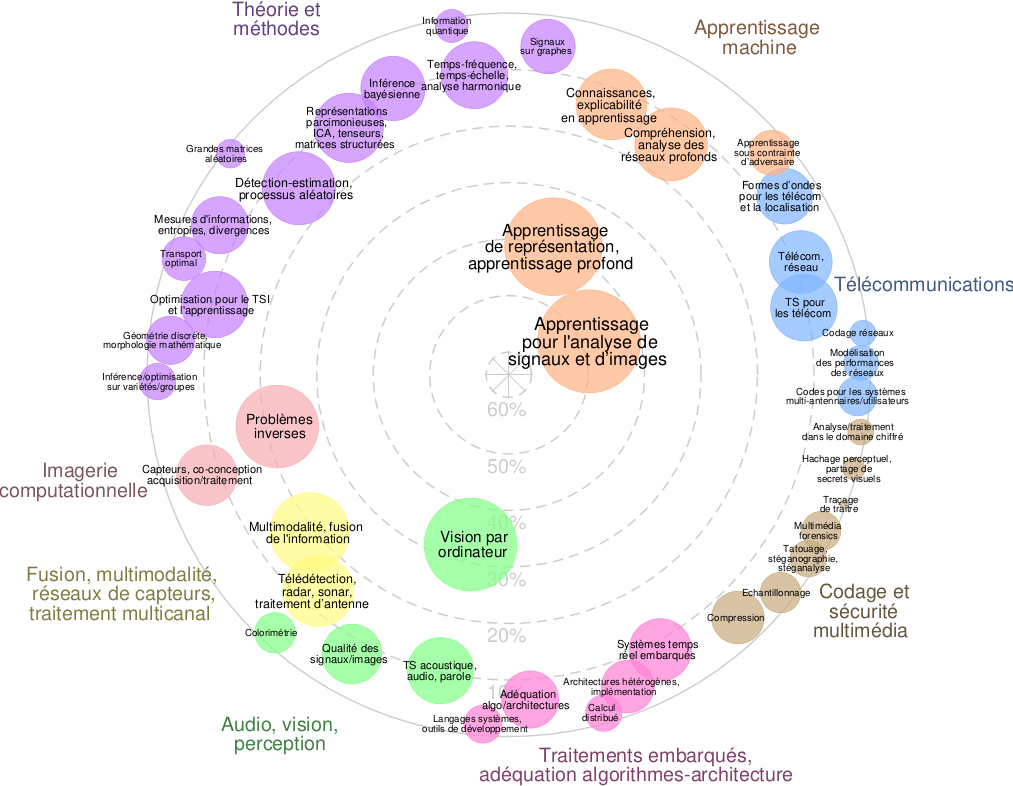
![]() Expertises du GdR - cartographie par Axes
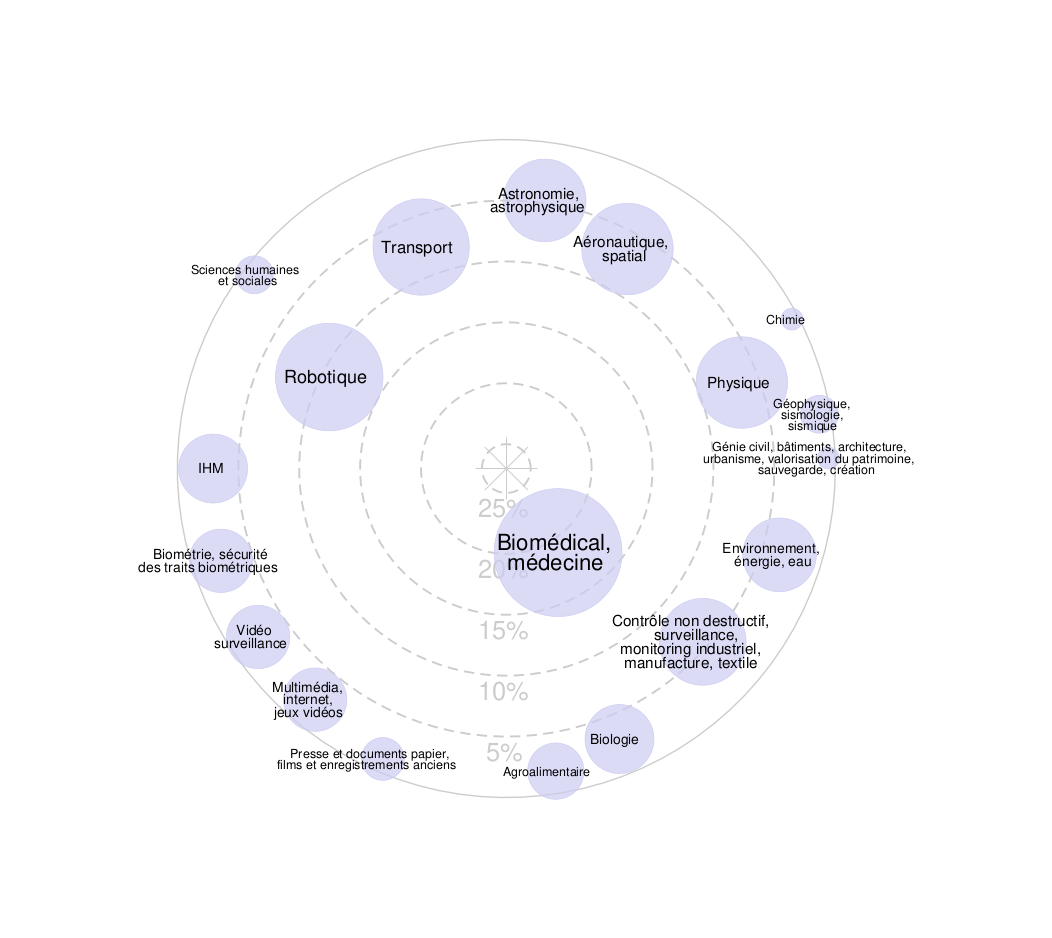
Expertises du GdR - cartographie par Axes![]() Expertises du GdR - cartographie par mots-clés applicatifs
Expertises du GdR - cartographie par mots-clés applicatifs